Wednesday, May 01, 2024
12:00 PM - 01:00 PM
Fun Run
It's a competition for some, a team event for some, a fun run/walk for others. Keep the tradition going and come out and do this race or volunteer.
Read more about this event Thursday, May 02, 2024
11:10 AM - 11:55 AM
Virtual Chat with the Code 600 Director
Everyone is Welcome!
ACTUAL TIME: 11:10 - 11:55
Read more about this event ACTUAL TIME: 11:10 - 11:55
Friday, May 03, 2024
05:00 PM - 05:00 PM
Deadline: 2024 Robert H. Goddard Award Nominations
The 2024 Robert H. Goddard award call has been released. The award descriptions, criteria, and nomination form are available on Sharepoint. All award nominations should be submitted using the online nomination form.
Read more about this event Wednesday, May 08, 2024
11:00 AM - 12:00 PM
GSFC AI Center of Excellence Seminar
Wednesday, May 08, 2024
01:00 PM - 04:30 PM
Workshop for ROSES Proposal Writers
SPSO will offer a Workshop for ROSES Proposal Writers. We do this at least annually and each time address new features of the Research Opportunities in Space and Earth Science (ROSES) solicitation. We encourage in-person attendance.
12:45 – 1:00 pm: Sign into virtual meeting, work out kinks, share stories
1:00 – 1:15 pm: What are Research and Analysis (R&A) proposals?
1:15 – 1:45 pm: How are R&A proposals evaluated?
1:45 – 2:00 pm: How do I find R&A opportunities?
2:00 – 2:15 pm: 15-minute break
2:15 – 3:00 pm: What are Goddard’s policies and Best Practices for proposal writers?
3:00 – 3:20 pm: How do I create a budget?
3:20 – 4:35 pm: How do I create a persuasive proposal?
Read more about this event 12:45 – 1:00 pm: Sign into virtual meeting, work out kinks, share stories
1:00 – 1:15 pm: What are Research and Analysis (R&A) proposals?
1:15 – 1:45 pm: How are R&A proposals evaluated?
1:45 – 2:00 pm: How do I find R&A opportunities?
2:00 – 2:15 pm: 15-minute break
2:15 – 3:00 pm: What are Goddard’s policies and Best Practices for proposal writers?
3:00 – 3:20 pm: How do I create a budget?
3:20 – 4:35 pm: How do I create a persuasive proposal?


At 7:26 this morning, BurstCube was successfully deployed from the ISS. The team now awaits the opportunity to communicate with the satellite, some t...
Thursday, April 18, 2024The OSIRIS-Rex Team has been awarded the prestigious award for innovation in aviation, Read more about this
3, 2, 1 … LIFTOFF! A SpaceX Falcon 9 rocket carrying NASA’s PACE (Plankton, Aerosol, Cloud, ocean Ecosystem) spacecraft launched on a SpaceX Falcon 9 ...
Thursday, February 08, 2024

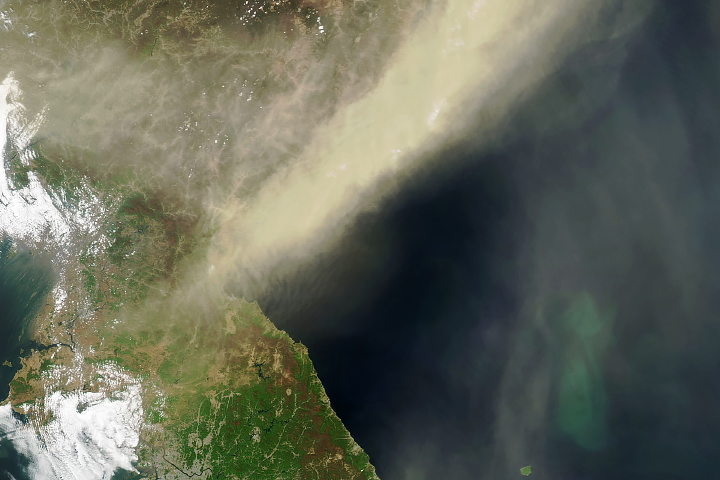
Earth Observatory Picture

HEASARC
Contact Us
Technical issues with this website may be reported to karen.smale@nasa.gov.
General inquiries about the scientific programs at NASA's Goddard Space Flight Center may be directed to the Center Office of Communications at 1.301.286.8955.
General inquiries about the scientific programs at NASA's Goddard Space Flight Center may be directed to the Center Office of Communications at 1.301.286.8955.